
AD-PT: Autonomous Driving Pre-Training with Large-scale Point Cloud Dataset
Published in NeurIPS-23, 2023
Abstract
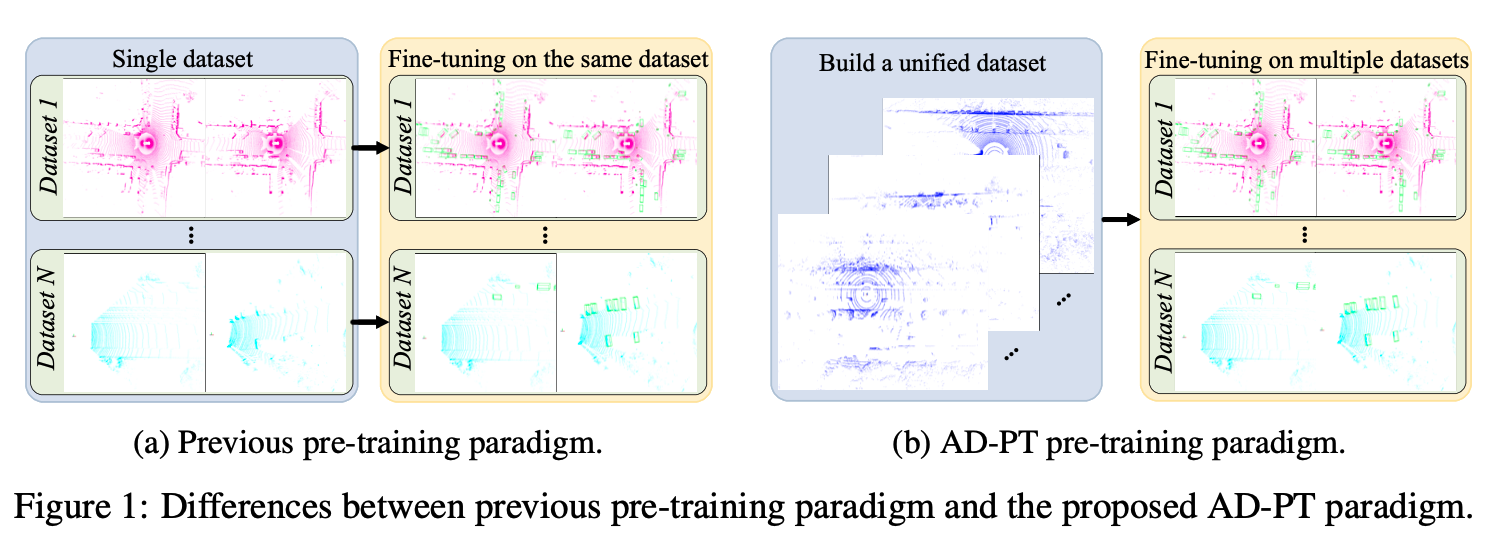
It is a long-term vision for Autonomous Driving (AD) community that the per- ception models can learn from a large-scale point cloud dataset, to obtain unified representations that can achieve promising results on different tasks or benchmarks. Previous works mainly focus on the self-supervised pre-training pipeline, mean- ing that they perform the pre-training and fine-tuning on the same benchmark, which is difficult to attain the performance scalability and cross-dataset application for the pre-training checkpoint. In this paper, for the first time, we are commit- ted to building a large-scale pre-training point-cloud dataset with diverse data distribution, and meanwhile learning generalizable representations from such a diverse pre-training dataset. We formulate the point-cloud pre-training task as a semi-supervised problem, which leverages the few-shot labeled and massive unlabeled point-cloud data to generate the unified backbone representations that can be directly applied to many baseline models and benchmarks, decoupling the AD-related pre-training process and downstream fine-tuning task. During the period of backbone pre-training, by enhancing the scene- and instance-level distribution diversity and exploiting the backbone’s ability to learn from unknown instances, we achieve significant performance gains on a series of downstream perception benchmarks including Waymo, nuScenes, and KITTI, under different baseline models like PV-RCNN++, SECOND, CenterPoint. Our code is available at: https://github.com/PJLab-ADG/3DTrans
Framework
The overview of the proposed AD-PT. By leveraging the proposed method to train on the unified large-scale point cloud dataset, we can obtain well-generalized pre-training parameters that can be applied to multiple datasets and support different baseline detectors. For more details, please refer to our original paper.

Experimental Results
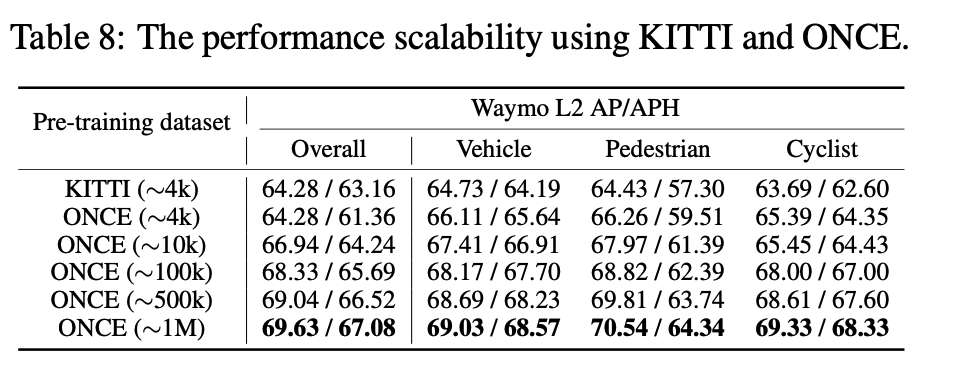
Excitingly, we observe that, the detection performance of downstream datasets (different datasets and different models) is continuously improved, as more pre-training data are used as shown below.

Conclusion
In this work, we have proposed the AD-PT paradigm, aiming to pre-train on a unified dataset and transfer the pre-trained checkpoint to multiple downstream datasets. We comprehensively verify the generalization ability of the built unified dataset and the proposed method by testing the pre-trained model on different downstream datasets including Waymo, nuScenes, and KITTI, and different 3D detectors including PV-RCNN, PV-RCNN++, CenterPoint, and SECOND.